一、 $ Hough $ 变换的参数平面( $ Hough $ 平面)
在图像平面( $ Image Plan $ )的坐标系 $ xOy $ 中,直线方程的斜截式为: $ y = px + q $ ,其中 $ p $ 为斜率, $ q $ 为截距
假设上式所代表的某条( $ p q $ 任意 )直线上存在一点 $ (x_{i},y_{i}) $ ,则此点满足 $ y_{i} = px_{i} + q $ ,若将其改写,可变为 \[ q = -x_{i}p + y_{i} \] 试想,此时若构造一个 $ pOq $ 坐标系,则 $ -x_{i} $ 为斜率, $ y_{i} $ 为截距,这是一条确定的直线!
换言之, $ Hough $ 变换就是将图像平面的点映射为参数平面( $ Parametric Plan $ ) 的线!
可以结合下图形象地理解:
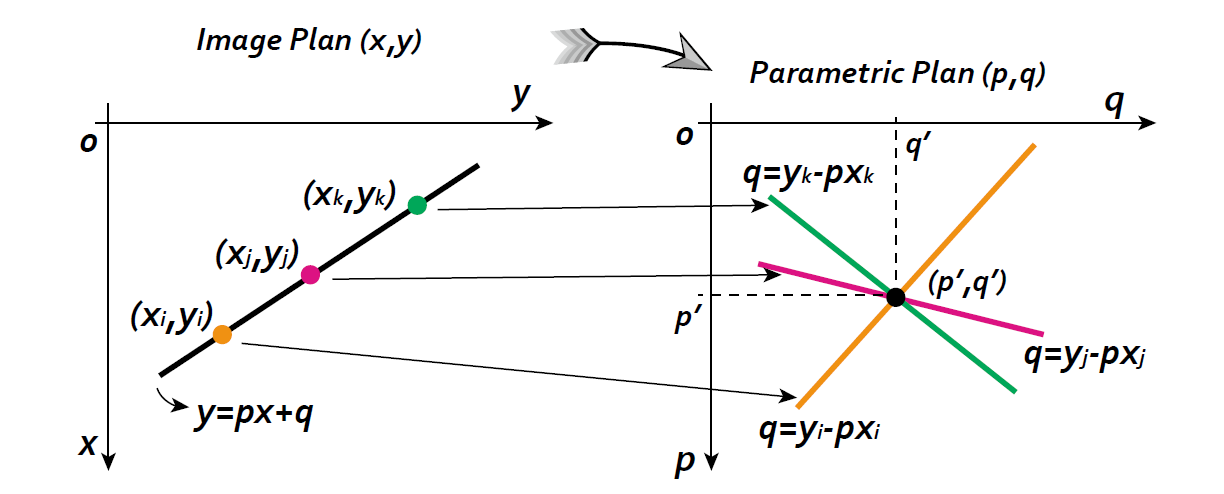
此时,可以在图像空间中考虑另一个点 $ (x_{j},y_{j}) $ ,它与点 $ (x_{i},y_{i}) $ 共同确定一条直线 $ q_{0} = -p_{0}x + y $
因为这两点具有同样的 $ p $ (斜率)和 $ q $ (截距),因此,二者在参数平面所代表的直线相交于同一点 $ (p_{0}, q_{0}) $
类似地,点 $ (x_{k},y_{k}) $ 所对应的直线也将经过点 $ (p_{0},q_{0}) $ !
由此得出一个直观的结论:
图像平面中,同一条直线上的点在参数平面中所对应的线相交于一点
并且这一点的坐标为(图像平面直线的斜率,图像平面直线的截距)
二、在 $ Hough $ 平面中使用 $ voting $ 策略寻找直线
在参数平面中,越多的直线相交于同一点 $ (p_{0},q_{0}) $ ,那么在图像平面中就有越多的点位于直线 $ y = p_{0}x + q_{0} $ 上,也就是说
这条直线越像直线,这条直线比较明显,这条直线比较长,这条直线应该被认为是直线并且应该被标识出来
那么,问题来了,怎么样才能知道这个点 $ (p_{0},q_{0}) $ 被几条参数平面中的直线经过呢? $ (p_{0},q_{0}) $ 又应该取什么值呢?
$ Hough $ 给出了一种遍历投票的解决办法,具体实现如下图所示:

(1)在 $ pOq $ 坐标系中划分网格(网格的精度根据实际要求自行确定),坐标轴的范围应从实际的最小斜率变化到
最大斜率、从实际的最小截距变化到最大截距( $ p_{min} $ 到 $ p_{max} $ , $ q_{min} $ 到 $ q_{max} $ )
(2)对于图像平面中的点 $ (x_{i},y_{i}) $ ,遍历 $ p $ ( $ q $ 也行)的所有网格取值,代入表达式 $ q = -x_{i}p + y_{i}$ 中可得到
相应的 $ q $ ( $ p $ )值,该值落在哪一个小网格内,就为该网格投一票
(3)遍历图像平面中所有的前景点,进行第(2)步操作,最终得到 $ pOq $ 坐标系中所有网格的投票情况
(4)筛选投票数较多(大于设定阈值)的网格,该网格所代表的 $ p $ 和 $ q$ 值便在图像平面中确定了直线 $ y_{i} = px_{i} + q $
三、方法的特点以及局限性
方法的特点:
如上右图所示,网格划分得越精细,容错率就越低,就越容易受噪声的影响,所找的直线数量就越多
相反,网格划分得越粗糙,容错率就越高,在一定程度上能克服噪声的影响,但所找的直线越不准确
因此,网格的划分精度往往取决于实际的需求,而且,挑选筛选直线的阈值也是一门技术活
方法的局限性:
当图像平面中的直线接近竖直时, $ p $ 的值将变得特别大或特别小,即 $ |p| $ 趋于无穷时, $ pOq $ 平面将无法划分!
即使硬着头皮划分,计算机也会因庞大的计算量而内存溢出!
因此,传统意义上的 $ Hough $ 线变换无法寻找竖直直线!
四、解决传统的 $ Hough $ 线变换无法寻找竖直直线的问题
使用极坐标方程代替直角坐标方程即可完美地解决这个问题!首先观察下图 $ a) $ :

在图像平面中,过原点做一条与直线垂直的垂线,该垂线的所代表的方向向量可写为: \[ (\ \rho cos(\theta),\ \rho sin(\theta)\ ) \] 设直线的方向向量为 $ (m,n) $ ,且经过点 $ (x_{i},y_{i}) $ ,则其方程可写为: \[ \frac{x-x_{i}}{m} = \frac{y-y_{i}}{n} \] 又因直线与垂线垂直,因此二者的方向向量满足: \[ (\ \rho cos(\theta),\ \rho sin(\theta)\ ) (m,\ n) = m\rho cos(\theta) + n\rho sin(\theta) = 0 \] 即: \[ m\rho cos(\theta) = -n\rho sin(\theta) \\ \\ \frac{m}{n} = -\frac{\rho sin(\theta)}{\rho cos(\theta)} \] 故有: \[ \frac{x-x_{i}}{y-y_{i}} = \frac{m}{n} = -\frac{\rho sin(\theta)}{\rho cos(\theta)} \] 令: \[ x_{i} = \rho cos(\theta) \;\;\;\; y_{i} = \rho sin(\theta) \] 代入,并化简整理,可得: \[ \frac{x-\rho cos(\theta)}{y-\rho sin(\theta)} = -\frac{\rho sin(\theta)}{\rho cos(\theta)} \\ \\ \rho cos(\theta)x - \rho^2cos^2(\theta) = \rho^2sin^2(\theta) - \rho sin(\theta)y \\ \\ \rho cos(\theta)x + \rho sin(\theta)y = \rho^2cos^2(\theta) + \rho^2sin^2(\theta) = \rho^2 \\ \\ \rho = xcos(\theta) + ysin(\theta) \] 可以很明显地看出,在参数平面上,一个点映射成了一条正余弦曲线,并且横纵坐标轴的取值范围缩减为: \[ \rho \in [-D,D] \;\;\;\;\;\; \theta \in [-90^o,90^o] \] 其中 $ D $ 为图像平面中对角之间的最大距离
寻找直线的遍历投票思想在这里是一样的,只不过参数平面交点的获得由直线相交变为了正余弦曲线相交
五、一些 $ Hough $ 线变换的实例(建立直观感受)

六、 $ Hough $ 线变换的实现
函数 myHoughLine 实现了 $ Hough $ 线变换,代码如下:
1 | function myHoughLine(I,lineNum) |
测试代码如下:
1 | close all;clear;clc;tic; |
对一张机场航拍图进行主干道提取:
这是原图(可以看出一共有3条主干道)

这是使用 $ Hough $ 线变换的提取结果图

七、附录: $ Hough $ 圆变换
$ Hough $ 圆变换的思想与线变换是一致的,区别仅在于参数空间的维数不同。( $ Hough $ 圆变换的参数空间为 $ a,b,r $ 三维)
